













Tecnica imageless nella chirurgia robotica del ginocchio
La tecnica imageless, i suoi principi di funzionamento, l’implementazione clinica, i vantaggi e i limiti, e presentare una panoramica aggiornata dei sistemi robotici basati su tale tecnologia
Introduzione
Negli ultimi anni la chirurgia robot-assistita per la sostituzione articolare del ginocchio (TKA – total knee arthroplasty) ha conosciuto una diffusione crescente, grazie alla capacità di migliorare l’accuratezza dell’allineamento, delle resezioni ossee e del bilanciamento dei tessuti molli. In questo scenario si distinguono due principali approcci tecnologici: i sistemi image-based, che utilizzano una tomografia computerizzata (TC) o una risonanza magnetica (RM) preoperatoria per la pianificazione, e i sistemi imageless, che invece non richiedono alcuna immagine pre-op e si basano esclusivamente sulla raccolta intraoperatoria di dati anatomici mediante sensori e strumenti di registrazione. L’obiettivo di questo capitolo è descrivere nel dettaglio la tecnica imageless, i suoi principi di funzionamento, l’implementazione clinica, i vantaggi e i limiti, e presentare una panoramica aggiornata dei sistemi robotici basati su tale tecnologia.
Principi della tecnica imageless
La tecnica imageless si fonda sull’acquisizione intraoperatoria dei riferimenti anatomici del paziente. Dopo l’esposizione chirurgica, il chirurgo registra una serie di punti di riferimento – condili femorali, corticale femorale, epicondili femorali, tuberosità tibiale, superficie articolare tibiale, malleoli – generando una “nuvola di punti” che viene confrontata con un modello osseo generico o adattativo presente nel software [1]. Il sistema elabora quindi l’asse meccanico del femore e della tibia, calcola il piano di resezione ottimale e l’orientamento della protesi, senza ricorrere a modelli derivati da TC o RM pre-operatorie [2]. Sensori ottici o elettromagnetici tracciano in tempo reale i movimenti intraoperatori, permettendo di misurare gap articolari e tensioni legamentose e di ottimizzare la posizione dei componenti protesici [3].
Vantaggi della tecnica imageless
L’assenza di imaging pre-operatorio consente di ridurre la complessità logistica, i costi e l’esposizione a radiazioni. La pianificazione intraoperatoria rende il workflow più flessibile e immediato, adattabile alle condizioni anatomiche reali osservate in sala operatoria. Diversi studi hanno dimostrato che l’accuratezza del posizionamento protesico ottenibile con sistemi imageless è paragonabile a quella dei sistemi image-based [4]. Inoltre, la possibilità di modificare i parametri in tempo reale consente una personalizzazione ottimale, particolarmente utile nei casi di ginocchia con deformità moderate.
Limiti e criticità
La precisione del sistema dipende strettamente dalla qualità della registrazione intraoperatoria: un errore nel reperire questi punti può favorire un errore nel posizionamento della mascherina di taglia che il robot non corregge. In presenza di gravi deformità, erosione condilare o assenza di landmarks anatomici affidabili, la costruzione del modello intraoperatorio può risultare meno accurata [1]. Nei casi complessi, come dopo osteotomie o revisioni, la mancanza di un modello tridimensionale paziente-specifico può limitare la predittività del piano chirurgico. La letteratura segnala inoltre una curva di apprendimento variabile: alcuni autori riportano una stabilizzazione dei tempi operatori dopo i primi 10 casi [5]. Con l’aumentare dells pratica I tempi diventano sovrapponibili rispetto alla chirurgia tradizionale , se non lievemente inferiori una volta standardizzati I passaggi
Implementazione clinica
Le fasi operative della tecnica includono: preparazione e posizionamento dei tracker; registrazione anatomica; pianificazione intraoperatoria; esecuzione delle resezioni con controllo robotico; verifica finale dei gap, della cinematica e dell’allineamento.
Evidenze cliniche
Tran et al. hanno osservato che la TKA imageless garantisce un’accuratezza superiore e migliori punteggi funzionali rispetto alla navigazione accelerometrica [2]. Hirschmann et al. hanno documentato risultati equivalenti tra modalità imageless e image-based [1]. Vermue et al. hanno evidenziato che la curva si stabilizza dopo nove interventi [5].
Sistemi robotici imageless
ROBIN Surgical System (Orthokey)
Il ROBIN Surgical System è una piattaforma semi-attiva completamente imageless progettata per ottimizzare la precisione delle resezioni ossee e il bilanciamento legamentoso senza necessità di TC o RM. Il workflow si basa sulla registrazione intraoperatoria dei riferimenti anatomici attraverso sistemi ottici di tracking. Il software genera un modello 3D adattativo dell’articolazione. Il braccio robotico opera entro confini aptici definiti intraoperatoriamente, guidando il chirurgo pur mantenendo il controllo manuale dell’esecuzione [1].

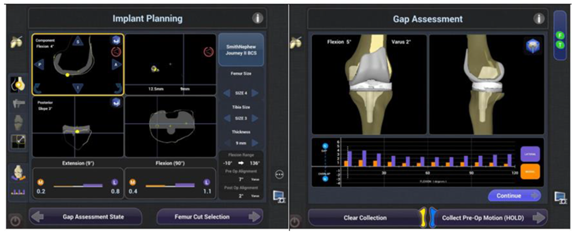
NAVIO (Smith & Nephew)
NAVIO è un sistema handheld completamente imageless. La pianificazione si basa esclusivamente sulla mappatura intraoperatoria della superficie articolare. Lo strumento semiautonomo modula la sua azione in tempo reale: la fresa si attiva o si arresta in base a confini aptici programmati, riducendo il rischio di resezioni eccessive e garantendo un’elevata fedeltà al piano operatorio [2].

CORI Surgical System (Smith & Nephew)
CORI è l’evoluzione di NAVIO e mantiene un workflow completamente imageless. Sensori ottici ad alta precisione permettono una ricostruzione volumetrica accurata dell’anatomia articolare. La fresa handheld opera tramite un sistema intelligente che limita le escursioni fuori piano, garantendo resezioni precise anche in presenza di deformità moderate [3].
ROSA Knee System – Modalità imageless (Zimmer Biomet)
Sebbene sia disponibile anche una versione image based, ROSA integra un workflow imageless basato su registrazione intraoperatoria mediante marcatori e sistemi ottici. Il modello 3D virtuale viene ricostruito in sala operatoria. Il braccio robotico aiuta l’esecuzione delle resezioni secondo il piano intraoperatorio, con sistema di guida assistita e limiti software definiti, integrando l’analisi cinematica e il bilanciamento legamentoso.[4].

ANDY Robotic Arm (Amplitude Surgical)
ANDY è un sistema che ha ottenuto certificazione CE e che mira a integrare un workflow basato esclusivamente su registrazione intraoperatoria. Le prime validazioni cadaveriche mostrano l’utilizzo di un braccio robotico semi-attivo con controllo aptico e modellazione basata su punti registrati intraoperatoriamente [5].
La nostra esperienza, iniziata nel 2022, è di circa 300 impianti robotici eseguiti con il Rosa Knee System. Attualmente eseguiamo con il robot circa il 70% degli impianti di protesi totale del ginocchio. Riteniamo che sia una tecnologia da utilizzare per essere più precisi, riproducibili, per favorire la migliore interazione del team, ma che debba essere utilizzata da chirurghi esperti del ginocchio. I continui feedback tra il chirurgo ed il sistema robotico consentono di ottimizzare la posizione delle maschere di taglio così come anche di effettuare le correzioni qualora i check dovessero evidenziare delle anomalie.
Occorrono ulteriori studi e dei robot a piattaforma libera, privy di bias aziendali, dato che i lavori sulla chirurgia robotica riportano in letteratura un bias di questo tipo in circa il 90% dei casi.
Conclusioni
La chirurgia robotica imageless rappresenta oggi una valida alternativa ai sistemi image-based. La flessibilità del workflow, la riduzione delle fasi preoperatorie e la possibilità di personalizzare in tempo reale le decisioni chirurgiche rendono questi sistemi particolarmente interessanti. Le evidenze disponibili confermano un’accuratezza comparabile a quella dei sistemi basati su TC, anche se sono necessari studi a lungo termine.
Riferimenti bibliografici
[1] Hirschmann M.T., Avram G., Graichen H., et al. Same same but different – Image-based versus imageless robotic-assisted total knee arthroplasty. Journal of Experimental Orthopaedics. 2024;11(4):e70062.
[2] Tran J.Y.S., Tang A.Y.T., Wong C.K., et al. Handheld imageless robotic total knee arthroplasty improves accuracy and early clinical outcomes when compared with navigation. Arthroplasty. 2025;7:18.
[3] Jacofsky D.J., Allen M. Robotics in arthroplasty: a comprehensive review. Journal of Arthroplasty. 2016;31(10):2353-2363.
[4] Zagra L., Riva D., Biazzo A., et al. Comparison between imageless and image-based workflows in robotic-assisted total knee arthroplasty. Knee Surgery, Sports Traumatology, Arthroscopy. 2025;33(2):1125-1135.
[5] Vermue H., Stroobant L., Thuysbaert G., et al. The learning curve of imageless robot-assisted total knee arthroplasty. International Orthopaedics. 2023;47:503-509.
Marco Conte; Vincenzo Verderosa; Valentina Marcialis; Santino Vassallo; Barbara Melis
Unità di Ortopedia e Traumatologia dello Sport presso: Policlinico Città di Quartu, via Silesu 10, 09045 Quartu SE (CA) – Casa di cura Madonna del Rimedio, via Giotto 6, 09170 Oristano (OR) – Casa di Cura Tommasini , via Gianni Lai, 08044 Jerzu (NU)
nostri canali social seguendoci su:



Gli algoritmi relativi alla medicina di emergenza rappresentano una risorsa fondamentale per i professionisti sanitari che, ciascuno nel proprio ambito...
L’impatto dell’Intelligenza Artificiale (AI) e dei Big Data nel settore sanitario è innegabile. L’AI sta rivoluzionando la scoperta di farmaci, la...
Edra, sempre attenta a garantire una formazione completa e adeguata alle esigenze del sistema salute, ha progettato il nuovo corso...
Introdurre la Medicina Narrativa nella progettazione dei percorsi di cura. Integrare la narrazione nel sistema cura e nel sistema persona...
