













Chirurgia robotica image-based nella protesica di ginocchio
L’impiego della robotica consente una maggiore precisione nel posizionamento delle componenti protesiche e una significativa riduzione degli outlier di allineamento rispetto alla tecnica tradizionale

Evoluzione tecnologica, precisione chirurgica e prospettive cliniche
Negli ultimi anni si è assistito a una progressiva e sempre più ampia diffusione della chirurgia robotica nel campo della protesica di ginocchio, sia monocompartimentale (UKA) che totale (TKA).
Oltre alla spinta derivata dall’industria, la possibilità di effettuare una pianificazione accurata e un controllo intraoperatorio dell’esecuzione rappresentano oggi un importante valore aggiunto dello sviluppo tecnologico. L’impiego della robotica consente infatti una maggiore precisione nel posizionamento delle componenti protesiche e una significativa riduzione degli outlier di allineamento rispetto alla tecnica tradizionale.
In questo contesto si sono affermate nuove filosofie di allineamento che, oltre al tradizionale allineamento meccanico, mirano a una maggiore personalizzazione dell’impianto in base all’anatomia ossea e legamentosa del singolo paziente. Tra queste, l’approccio dell’allineamento funzionale paziente-specifico consente di eseguire un impianto biomeccanicamente bilanciato, rispettoso dell’integrità dei tessuti molli, dell’altezza e orientamento della linea articolare, nel rispetto dell’orientamento della troclea femorale e del tracking femoro-rotuleo.
Il robot aggiunge valore proprio nel collegare queste scelte al bilanciamento degli spazi: misura e simula in tempo reale tagli, posizionamento e tensioni legamentose, utilizzando – a seconda del modello – diverse tecnologie che prevengono resezioni eccessive o conflitti con i tessuti molli, aumentando la fedeltà al piano operatorio e riducendo la variabilità inter-operatore.
Attualmente si distinguono robot completamente attivi, in grado di eseguire autonomamente le resezioni ossee pianificate (ancora poco diffusi nella chirurgia di ginocchio), e sistemi semi-attivi, in cui il chirurgo mantiene il controllo del braccio robotico ricevendo feedback tattili, uditivi e visivi entro limiti prestabiliti che ne definiscono il raggio d’azione. Un’ulteriore distinzione è tra sistemi image-less, in cui la programmazione avviene intraoperatoriamente sulla base di un modello 3D ricostruito mediante sonde, e sistemi image-based.
Caratteristiche dei sistemi image-based
Un sistema robotico image-based richiede un’indagine radiologica preoperatoria, solitamente una tomografia computerizzata (TC) di anca, ginocchio e caviglia, eseguita secondo protocolli standardizzati del produttore per ottenere una rappresentazione completa dell’arto inferiore.
Il file DICOM viene poi caricato sulla piattaforma software proprietaria, segmentato e convertito in un modello tridimensionale individuale, che costituisce la base per la pianificazione preoperatoria.
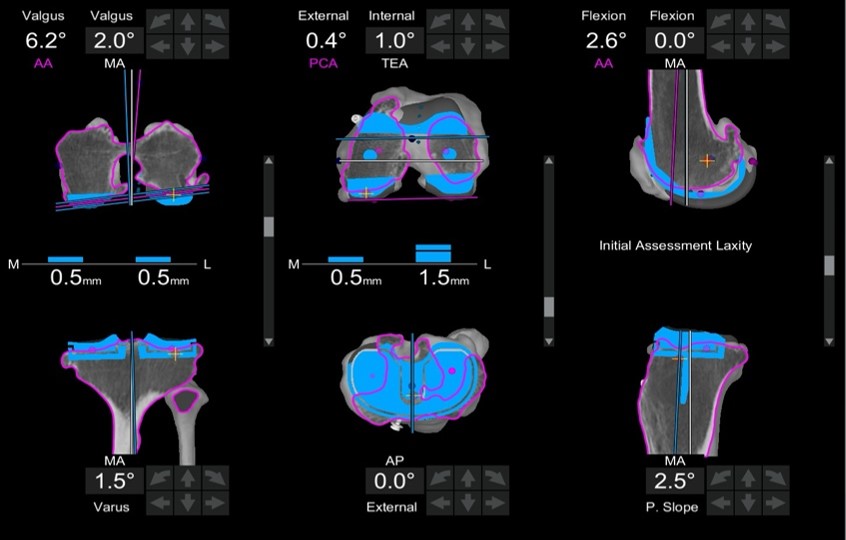
Durante l’intervento, una mappatura intraoperatoria aggiuntiva viene eseguita con un puntatore ottico: la fusione tra questa e la TC consente al robot di riconoscere con estrema precisione l’anatomia reale del paziente e di guidare accuratamente le resezioni ossee e il posizionamento protesico.
Figura 1: Schermata di pianificazione intraoperatoria con sistema robotico image-based Mako (Stryker). Al chirurgo vengono fornite informazioni relative a orientamento e spessore delle resezioni e lassità legamentosa in flessione ed estensione, per compar
Principali sistemi robotici image-based
Mako (Stryker)
Sistema robotico semi-attivo e image-based che utilizza una TC preoperatoria per ricostruire un modello 3D con cui pianificare resezioni, orientamento dell’arto e posizionamento/dimensione delle componenti. In sala operatoria, il modello viene integrato all’anatomia reale tramite marcatori ottici secondo principi di stereofotogrammetria. Il braccio robotico opera entro confini aptici che aumentano la sicurezza, fornendo feedback tattili, uditivi e visivi: guida il gesto chirurgico senza sostituire l’operatore. Dopo la rimozione degli osteofiti, il bilanciamento capsulo-legamentoso consente di modificare intraoperatoriamente posizionamento e orientamento dei componenti rispetto al piano preoperatorio, combinando le preferenze del chirurgo con i dati oggettivi del sistema. In sintesi, Mako integra pianificazione TC, registrazione ottica e controllo aptico per tradurre un piano preciso in un’esecuzione sicura e personalizzata.
CUVIS-Joint (Curexo)
Sistema CT-based con pianificazione preoperatoria su ricostruzioni 3D e possibilità di resezioni automatiche eseguite dal robot sotto controllo continuo del chirurgo. Utilizza un tracking ottico e fornisce misure quantitative per il bilanciamento funzionale. È concepito principalmente per TKA, ma può essere impiegato anche per UKA.
MicroPort SkyWalker
Piattaforma CT-based per TKA, dotata di braccio semi-attivo “guide-positioner” che orienta il posizionamento delle guide di taglio in base all’anatomia e alle preferenze di allineamento del chirurgo. Le resezioni sono effettuate manualmente attraverso tali guide.
Zimmer Biomet ROSA Knee System
Sistema capace di operare sia in modalità image-less che image-based. In quest’ultima, elabora un modello 3D virtuale derivato da radiografie bidimensionali a lunghezza intera, generando un modello tridimensionale su cui pianificare i tagli. Il robot guida il posizionamento delle guide di taglio, mentre le resezioni ossee sono eseguite manualmente dal chirurgo.
Evidenze cliniche
L’esperienza clinica maturata negli ultimi anni ha consolidato il ruolo dei sistemi robotici image-based come strumenti in grado di migliorare la precisione tecnica e la prevedibilità dei risultati nella chirurgia protesica di ginocchio.
Nella protesi monocompartimentale, diversi studi hanno dimostrato una maggiore accuratezza nel posizionamento delle componenti e un ripristino più fedele dell’asse meccanico nativo rispetto alla chirurgia tradizionale o ai sistemi imageless. L’allineamento coronale e sagittale delle componenti risulta più coerente con il piano preoperatorio, con una riduzione significativa degli outlier.
Dal punto di vista clinico, questi dati si traducono in una migliore stabilità e in un bilanciamento dinamico più fisiologico, spesso percepiti dai pazienti come una sensazione di “ginocchio proprio”.
L’approccio image-based permette inoltre di preservare in modo più costante la joint line, mantenendo la congruenza femoro-tibiale e riducendo il rischio di edge loading e di usura precoce.
Sul piano funzionale, si osserva in media un recupero più rapido, un minore dolore post-operatorio e una più precoce ripresa delle attività quotidiane rispetto alla chirurgia convenzionale, pur in assenza – al momento – di differenze cliniche significative a lungo termine nei punteggi funzionali rispetto alle tecniche manuali. Nella protesi totale di ginocchio, la robotica image-based ha confermato un’elevata precisione nel posizionamentoe delle componenti protesiche sui piani sagittale, coronale e trasversale, con una migliore simmetria dei gap e un bilanciamento legamentoso più prevedibile rispetto a chirurgia convenzionale. Il controllo aptico delle resezioni presente in alcuni sistemi robotici image-based e la limitazione dei movimenti del braccio robotico al di fuori del piano riducono i danni iatrogeni ai tessuti molli, migliorando la sicurezza intraoperatoria. Diversi autori riportano tempi di riabilitazione più rapidi e una riduzione del dolore post-operatorio, mentre i registri protesici nazionali e internazionali evidenziano una tendenza a minori tassi di revisione rispetto alla chirurgia convenzionale. Sebbene la letteratura non mostri ancora differenze statisticamente significative sugli esiti funzionali a lungo termine, la costanza e l’affidabilità dei risultati rappresentano un valore aggiunto soprattutto nei casi complessi o in presenza di deformità articolari importanti.
In sintesi, le evidenze cliniche suggeriscono che, rispetto alla chirurgia convenzionale e ad alcuni sistemi imageless, la robotica image-based migliora l’affidabilità esecutiva nella UKA e la precisione geometrica nella TKA, consentendo un approccio più coerente, riproducibile e personalizzato. La tecnologia non sostituisce il giudizio del chirurgo, ma ne potenzia la capacità di adattare l’intervento alla specifica anatomia e biomeccanica del paziente.
Limiti e considerazioni pratiche
Pur offrendo vantaggi in termini di pianificazione e precisione, la robotica image-based presenta alcune criticità. Sul piano organizzativo, richiede TC preoperatoria, caricamento e segmentazione dei dati, oltre a una rigorosa integrazione con la radiologia e con la sala operatoria. La dose radiante, sebbene ridotta dai protocolli low-dose, rappresenta un’esposizione aggiuntiva, richiedendo una selezione attenta dei casi e l’utilizzo di alternative quando appropriato. Sul fronte dei costi, pesano investimento iniziale, manutenzione, consumabili e tempi operatori potenzialmente più lunghi nelle fasi iniziali di adozione. L’accuratezza può essere influenzata da errori di segmentazione, mismatch tra modello e anatomia reale, perdita di tracciamento ottico o registrazioni imprecise. A ciò si aggiungono considerazioni su sicurezza informatica, gestione dei dati e necessità di piani di conversione immediati in caso di guasto. Infine, la letteratura sottolinea che la superiorità radiografica non sempre si traduce in benefici funzionali a lungo termine. La varietà delle strategie di allineamento oggi adottate complica inoltre il confronto diretto tra piattaforme, poiché i chirurghi possono mirare a obiettivi di bilanciamento differenti.
Conclusioni
La chirurgia robotica image-based rappresenta oggi la frontiera più evoluta della protesica di ginocchio, offrendo una pianificazione personalizzata e una precisione intraoperatoria difficilmente ottenibile con le tecniche convenzionali. Resta tuttavia necessario bilanciare benefici, costi e complessità, continuando a raccogliere evidenze cliniche solide che confermino il reale impatto sui risultati funzionali e sulla longevità degli impianti.
Bibliografia
1. Burger JA, Kleeblad LJ, Laas N, Pearle AD. Mid-term survivorship and patient-reported outcomes of robotic-arm assisted partial knee arthroplasty. Bone Joint J. 2020 Jan;102-B(1):108-116. doi: 10.1302/0301-620X.102B1.BJJ-2019-0510.R1.
2. Zambianchi F, Seracchioli S, Franceschi G, Cuoghi Costantini R, Malatesta A, Barbo G, Catani F. Image-based robotic-arm assisted unicompartmental knee arthroplasty provides high survival and good-to-excellent clinical outcomes at minimum 10 years follow-up. Knee Surg Sports Traumatol Arthrosc. 2023 Dec;31(12):5477-5484. doi: 10.1007/s00167-023-07599-2
3. Hampp EL, Sodhi N, Scholl L, Deren ME, Yenna Z, Westrich G, Mont MA. Less iatrogenic soft-tissue damage utilizing robotic-assisted total knee arthroplasty when compared with a manual approach: A blinded assessment. Bone Joint Res. 2019 Nov 2;8(10):495-501. doi: 10.1302/2046-3758.810.BJR-2019-0129.R1.
4. Australian Orthopaedic Association National Joint Replacement Registry (AOANJRR). Annual Report 2024. Adelaide: AOA; 2024.
5. Ruangsomboon P, Ruangsomboon O, Pornrattanamaneewong C, Narkbunnam R, Chareancholvanich K (2023) Clinical and radiological outcomes of robotic-assisted versus conventional total knee arthroplasty: a systematic review and meta-analysis of randomized controlled trials. Acta Orthop 94:60–79. https://doi. org/10.2340/17453674.2023.9411
6. Zambianchi F, Bazzan G, Marcovigi A, Pavesi M, Illuminati A, Ensini A, Catani F. Joint line is restored in robotic-arm-assisted total knee arthroplasty performed with a tibia-based functional alignment. Arch Orthop Trauma Surg. 2021 Dec;141(12):2175-2184. doi: 10.1007/s00402-021-04039-z. Epub 2021 Jul 13. PMID: 34255176.
Michele Di Flavio, Francesco Zambianchi, Fabio Catani
Azienda Ospedaliero-Universitaria di Modena, Università degli Studi di Modena e Reggio-Emilia
nostri canali social seguendoci su:



Gli algoritmi relativi alla medicina di emergenza rappresentano una risorsa fondamentale per i professionisti sanitari che, ciascuno nel proprio ambito...
L’impatto dell’Intelligenza Artificiale (AI) e dei Big Data nel settore sanitario è innegabile. L’AI sta rivoluzionando la scoperta di farmaci, la...
Edra, sempre attenta a garantire una formazione completa e adeguata alle esigenze del sistema salute, ha progettato il nuovo corso...
Introdurre la Medicina Narrativa nella progettazione dei percorsi di cura. Integrare la narrazione nel sistema cura e nel sistema persona...
